雷达作为自动驾驶系统的“眼睛”,通过向目标物体发射和接收电磁波,从而获取目标到电磁波发射点的距离、多普勒频率、方位角、仰角等信息。 与摄像头等其他传感器相比,雷达几乎不受天气和光线的影响,可以实现全天候、全天候的检测,因此也是实现高水平自动驾驶技术的关键传感器。
在过去的 30 年里,大多数汽车雷达都采用调频连续波 (FMCW) 技术,雷达信号处理是在模拟电路中完成的。 近年来,随着自动驾驶技术向更高层次发展,对汽车雷达的分辨率和精度提出了更高的要求,更先进的数字编码调制(DCM)技术受到关注。 在 DCM 中,信号处理主要以数字方式完成。 本文将从多个维度探讨DCM雷达的技术优势。
FMCW与DCM雷达技术
FMCW和DCM雷达的基本区别在于它们传输的信号。FMCW传输信号的短脉冲,在其传输周期内频率会增加。在当前的汽车雷达中,FMCW 信号通常占用 50MHz 的带宽。而DCM雷达传输包含特殊编码序列的较长脉冲信号,占用1GHz至2GHz的带宽。
对比度
对比度是指雷达区分两个近距离目标的能力。也就是说,雷达能够检测到并分辨两个紧密间隔目标之间的反射信号差异。典型的例子是检测站在汽车旁边的儿童。相对汽车(强反射物)而言,儿童是弱反射物。
雷达发射和接收信号的天线是使用多个辐射元件构建的,具有较少天线元件的雷达具有较宽的主瓣和相对较高的旁瓣,因而对比度较低,无法区分距离很近的儿童和汽车。而具有较多天线元件的雷达,例如 Uhnder 的 DCM 雷达,会产生更窄的天线波束和相对较低的旁瓣(相对于主瓣),从而提供更高的对比度。
此外,DCM雷达的对比度优势还来自于DCM波形。DCM使用调制到射频载波相位的扩频序列,这些扩频序列具有所谓的“处理增益”。也就是说,当接收信号与发出的信号相关时,接收到的信号会被放大。因此,回波也随着传输的扩频波形而被放大。这有效提高了雷达检测小目标(例如儿童)的能力。
抗干扰
随着新车上搭载的雷达数量越来越多,雷达间的信号干扰问题也日益引起重视。想象在两条车道上往相反方向行驶的两辆汽车,当它们靠近时,车上雷达发出的信号会相互干扰,从而影响探测目标的能力。基于DCM技术的雷达能够通过以下三种方式解决干扰问题。
感应和监测干扰: DCM雷达可以感应干扰源是来自FMCW还是DCM雷达的信号,并监测干扰,以减轻或避免干扰。
减轻干扰:如果干扰信号在同一频段,并且与雷达接收回波的时隙重合,DCM雷达可以抑制或减轻这种干扰的影响。 例如,搭载Uhnder当前芯片版本的 DCM 雷达可同时减轻多达八个FMCW干扰。此外,由于每个DCM雷达发射的信号都有独特的扩频序列,具有相同序列的信号会被放大,而具有不同序列号的信号会被抑制,从而有助于 DCM雷达减轻信号干扰。
避免干扰:在感应和监测的基础上,DCM雷达可以改变其工作频段或传输时隙,以避免与工作在相同时隙和频段的另一台雷达发生冲突。

尺寸
雷达的尺寸很大程度上取决于天线的尺寸(发射和接收元件的数量)、印刷电路板(PCB)上的元件数量和散热要求。如果雷达消耗的功率更高,则需要更大的散热器(表面积),雷达尺寸也会更大。
我们知道,体积大的雷达很难安装在车上。为了减小雷达尺寸,一些设计人员考虑使用稀疏阵列来减小天线的尺寸。稀疏阵列具有更少的元件,但也意味着元件需要处理的信号更密集。大多数FMCW雷达无法支持这种处理能力,需要外部数字处理器支持,这在一定程度上增加了功耗、尺寸和成本。
搭载Uhnder芯片的DCM雷达外形小巧,从而为OEM及雷达供应商在设计传感方案时提供更大的灵活性。例如,汽车制造商可以并排使用3个超薄DCM雷达:使用1个用于短程探测,2个联合使用可作中程探测,3个联合使用可作远程探测。
模块化
模块化将有助于降低工程开发成本,并简化供应链和制造流程。通过模块化,制造商可以使用基本的雷达芯片构建短程(SRR)、中程(MRR)、远程(LRR)和超远程(SLRR)雷达,并通过软件编程实现不同的分辨率。
实现模块化有两种方法。一是将基本雷达芯片与额外的数字处理芯片级联,以构建更复杂的雷达。使用这种方法能够优化最简单且便宜的雷达解决方案,但同时整体成本和功率也会更高。许多FMCW雷达都采用这种方法。
第二种方法是构建功能更强大的、且支持编程的雷达芯片。使用这种方法,芯片成本会略微增加,但产品的总体拥有成本(TCO)依旧非常具有吸引力。这也是 Uhnder的DCM雷达芯片遵循的方法。Uhnder的DCM雷达芯片可通过编程选择发射器与接收器的数量。此外,芯片附带的可编程软件堆栈可以帮助制造商降低相关工程开发成本。
功率
目前市售的 FMCW 芯片支持 3 或 4 个发射器和 4 个接收器(3x4 或 4x4),而 Uhnder 的 DCM 雷达芯片支持 12 个发射器和 16 个接收器(12x16)。 雷达波的波束宽度与发射单元数和接收单元数的乘积成反比。 波束越窄,分辨率越高,因此 Uhnder 的 DCM 雷达可以提供更高的分辨率。
虽然,可以级联 3x4 或 4x4 FMCW 雷达芯片(3 或 4 个芯片)以提高分辨率。 但在这种情况下,雷达需要 3-4 个雷达芯片和一个单独的数字处理器芯片才能有效地组合各个 FMCW 雷达芯片的输出。 这意味着该解决方案总共需要 4 或 5 个芯片,这些芯片还需要更精细的电源子系统,因此整体配置将比单个 DCM 雷达芯片及其电源消耗更多的功率。
另一个关于功率的误解是,由于 DCM 雷达带宽较宽,因此需要复杂的高功率 A/D
转换器。 这对于普通的 A/D 转换器设计来说是正确的,但 Uhnder 使用独特的交错式 A/D 转换器设计,以低功耗提供高动态范围,并且可以针对不同的带宽进行调整。
成本
为了实现高分辨率,FMCW 系统通常需要更多的芯片(3-4 个雷达芯片、一个数字处理器芯片和一个更昂贵的电源管理芯片)。 此外,这些芯片需要更复杂的印刷电路板 (PCB) 布局和更大的 PCB 面积。 76-81 GHz 的 PCB 需要特殊材料并且价格昂贵。
更高的芯片数量意味着更多的周围组件,例如去耦电容器。 由于高分辨率 FMCW 系统消耗更多功率,因此需要更复杂的热管理系统。 也就是说,芯片产生的热量必须以有效的方式散发。 这增加了整体设计的复杂性、尺寸和成本。
传感器融合
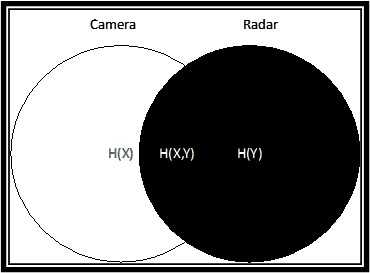
除了雷达,摄像头也是当前车载ADAS系统中的重要传感器。 摄像头擅长识别物体的形状和颜色,但在恶劣天气或黑暗环境中表现不佳,而雷达则提供 24/7 场景中物体距离和速度的信息。 通过深度神经网络(DNN)等算法融合雷达+摄像头信息,进一步提升自动驾驶的安全性能。
根据信息论,更多的信息有助于改进决策。 雷达获取的新信息量 (H(Y)) 取决于雷达的分辨率,而雷达的分辨率又取决于天线元件的数量。 在雷达中,发射和接收天线元件的数量就是它的眼睛。 如果雷达有更多的发射和接收天线元件(虚拟通道),它可以看得更远,并在视场的不同角度检测到更多的物体。
Uhnder 的单个 DCM 雷达芯片提供 192 个虚拟通道,而市场上常见的 FMCW 雷达提供 12 到 16 个虚拟通道。 一些较新的 FMCW 雷达具有 288 个虚拟接收器,但它们并未广泛使用。 FMCW雷达芯片可以通过级联提供更多的虚拟通道,一些供应商使用级联可以提供192到2300个通道。 而DCM雷达也可以通过级联四颗芯片提供3072个通道。 但接上芯片后,雷达系统的复杂度、成本和功耗都会大幅增加。
综上所述,基于DCM技术的雷达在对比度、抗干扰、尺寸、功耗和成本等方面具有优势。 此外,由于DCM雷达设计支持软件编程,加上自身的模块化,可以为当今的汽车设计提供更灵活的解决方案。
Uhnder成立于2015年,率先将DCM技术引入汽车雷达,并成功研发出首款车规级4D数字成像雷达芯片及相关软件,为自动驾驶技术提供更精准的数字感知。 2018 年,麦格纳推出了采用 Uhnder 雷达芯片的 ICON 数字雷达,并于 2021 年宣布电动汽车制造商 Fisker 的 Ocean SUV 将采用数字雷达。 此外,Uhnder还与黑芝麻智能、欧菲光、福瑞智行等多家龙头企业建立了合作关系,共同推进基于DCM技术的雷达产品应用,助力自动驾驶安全。















